




인벌류트 웜 기어와 인벌류트 헬리컬 기어의 맞물림 쌍은 저출력 동력 전달 장치에 널리 사용되어 왔습니다. 이러한 맞물림 쌍은 설계 및 제작이 비교적 용이하며, 생산 과정에서 부품의 정밀도가 다소 떨어지거나 변속비 요구 조건이 까다롭지 않은 경우에도 좋은 선택이 될 수 있습니다.
현재 이러한 종류의 전송 쌍은 이론이 아직 완전히 성숙하지 않았기 때문에 일반적인 설계 데이터에 포함되어 있지 않습니다.
이러한 맞물림 쌍은 전형적인 점 접촉식 동력 전달 쌍입니다. 미시적인 관점에서 보면 국부 응력이 크고 효율이 낮습니다. 하지만 다행히 전달 토크가 작고 효율에 대한 요구 조건이 낮기 때문에 시장성이 높습니다. 이러한 설계는 웜 기어의 제조 및 조립 과정에서 발생하는 여러 문제점을 해결합니다.
본 논문에서는 접촉점의 이동 방향을 따라 애니메이션을 이용하여 매우 작은 범위 내에서 법선 방향을 따라 이동하는 이러한 접촉쌍의 표현을 주로 논의합니다.
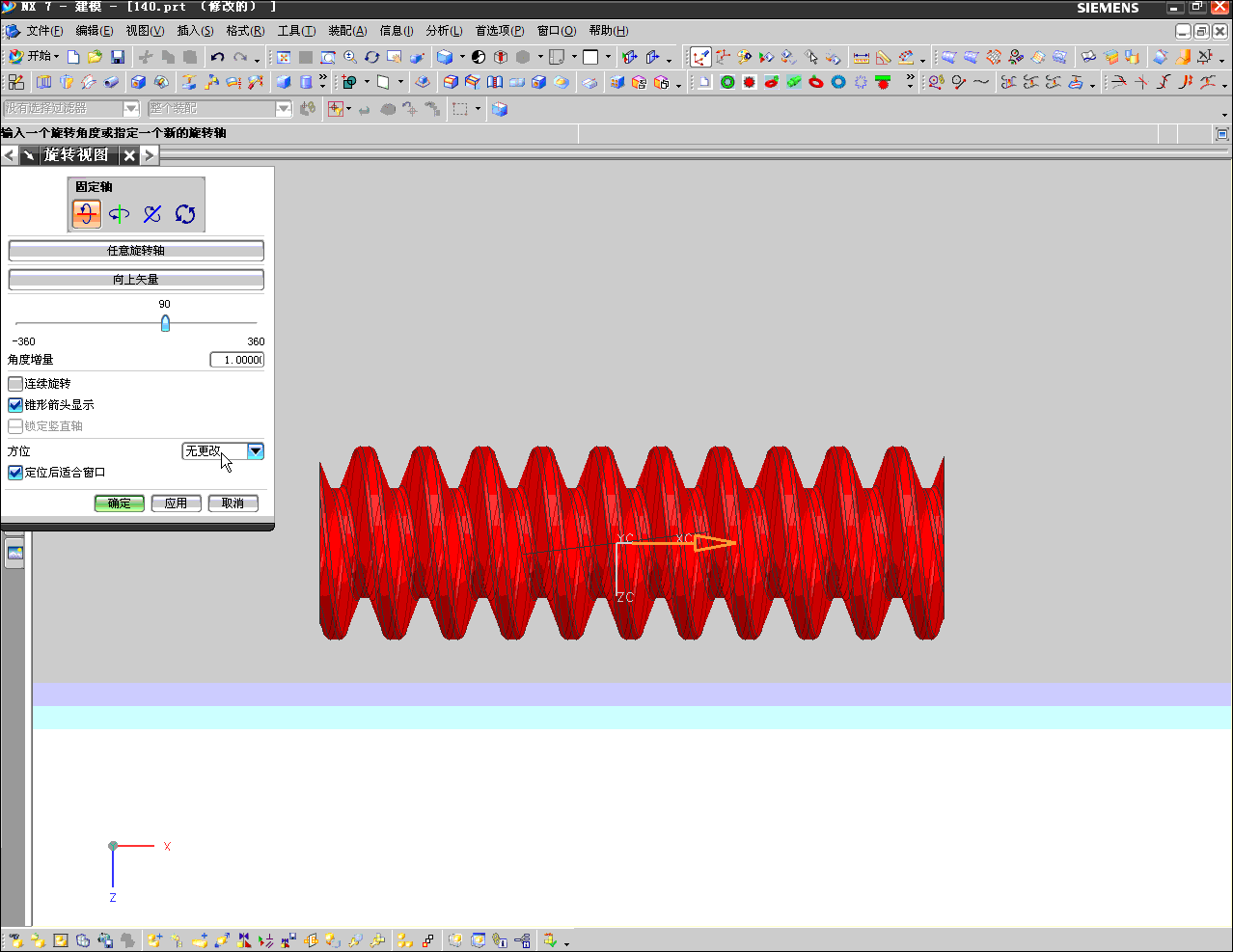
도면에서 맞물리는 기어 쌍의 중간 부분에 평면을 만들고, 도면에서 해당 평면을 반투명하고 대비되는 색상으로 처리한 다음, 다음 그림과 같이 수직 평면의 위치에 있는 기어 중심에서 웜까지의 수직선을 중심으로 웜의 상승 각도를 회전시킵니다.
처리 후, 메시 마크를 확인해야 하는 전송 쌍을 대비되는 색상으로 표시하고, 그중 하나는 반투명하게 하여 동적 시뮬레이션 과정 전체에서 메시 위치의 변화를 명확하게 볼 수 있도록 합니다. 아래 그림을 참조하십시오.
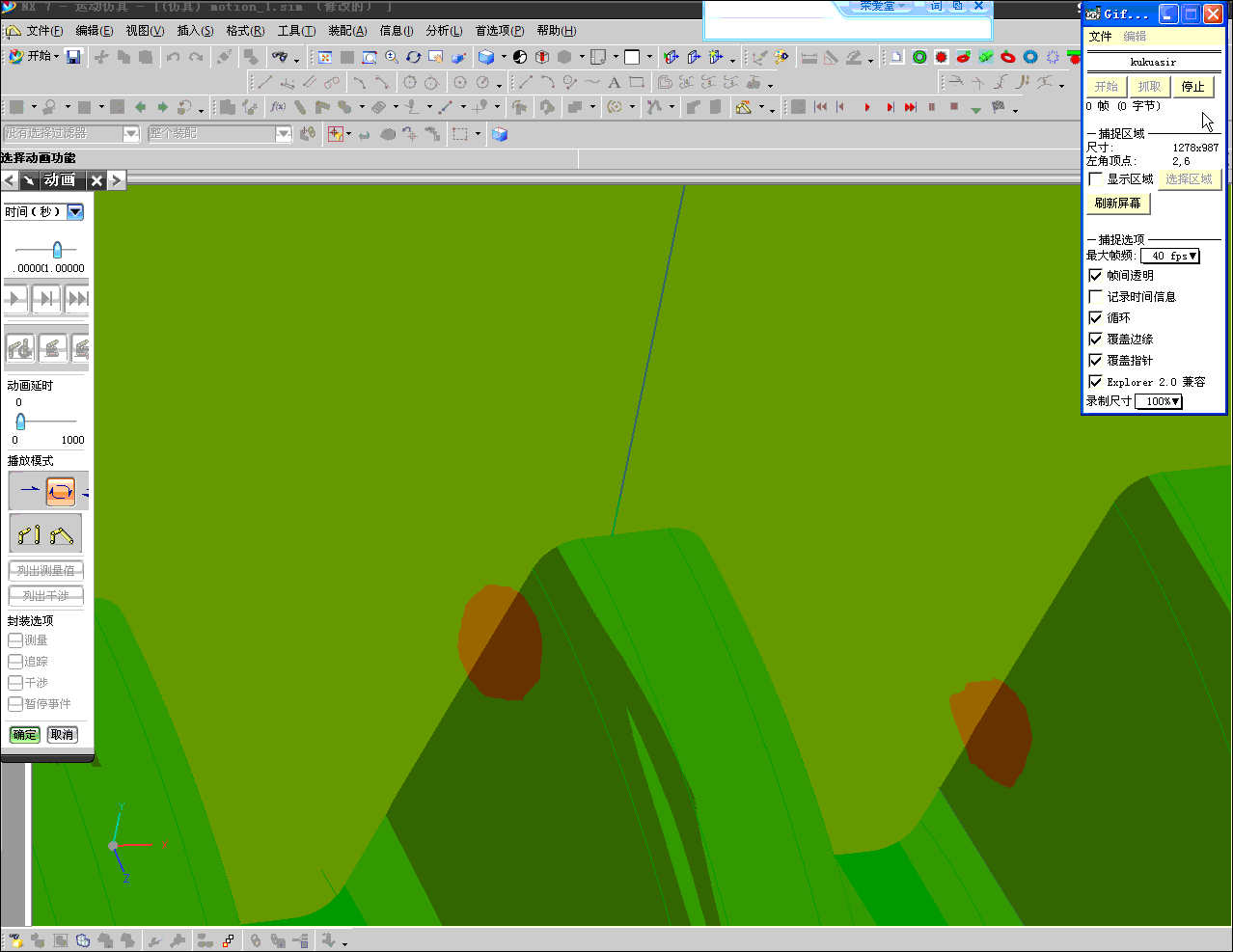
확연한 색상 대비를 보이는 맞물림 접점의 이동 과정에서, 접점이 일반 판재를 통과하는 것을 확인할 수 있다.
위 예시에서 계산된 레코드 수:
헬리컬 기어가 있는 인벌류트 웜의 예비 계산 기록
입력 데이터
정상 탄성 계수: 6, 웜 인덱싱 원 직경: 5, 웜 헤드 개수: 1, 헬리컬 기어 톱니 개수: 40
정상 압력각: 20도 헬리컬 기어 사전 선택 헬릭스 각도: 6.89210257934639
계산 데이터
정상 탄성 계수: 6
축탄성계수: 604조 3천672억 2천3백만 9천35
나사산 상승 각도: 6.89210257934639
나선 방향: 웜 기어와 헬리컬 기어가 같은 방향을 향합니다.
변위가 0인 중심 거리: 14.5873444603807
입력 전송 쌍의 중심 거리: 14.75
나사 이빨의 환산 개수: 8.27311576399391
웜 축 방향 압력각: 20.1339195068419
헬리컬 기어의 반경 방향 편향 계수: 2711
웜 헬릭스 각도: 83.1078974206537
웜 83.10789742065361의 기본 매개변수
벌레의 큰 지름: 6.2cm, 벌레의 작은 지름: 3.5cm, 벌레 이빨 개수: 1개
웜 기어 법선 탄성 계수: 6, 웜 기어 법선 압력각: 20, 웜 기어 인덱싱 원 직경: 5
웜 반경 방향 변위 계수: 0, 웜 베이스 원 직경: 1.56559093858108
웜 엔드 모듈: 5 웜 축 모듈: 604조 3천672억 2천3백만 9천35개
웜 축 방향 압력각: 20.1339195068419 웜 단면 압력각: 71.752752179164
웜 인덱싱 원의 정상 치아 두께: 942477796076937 웜 인덱싱 원의 측정 치아 높이: 6
웜 인덱싱 서클 스레드 상승 각도: 6.89210257934639 웜 인덱싱 서클 헬릭스 각도: 83.1078974206537
벌레의 유효 이빨 길이: 25
웜(축) 리드: 1.89867562790706
헬리컬 기어의 기본 매개변수
헬리컬 기어의 외경: 25.7mm, 부경: 23mm, 헬리컬 기어의 톱니 수: 40개
헬리컬 기어의 법선 탄성 계수: 6, 헬리컬 기어의 법선 압력각: 20도, 헬리컬 기어 수정 계수: 2711
헬리컬 기어 인덱싱 원 직경: 24.1746889207614 헬리컬 기어 베이스 원 직경: 22.69738911811
헬리컬 기어 단면 모듈: 604367223019035 헬리컬 기어 단면 압력각: 20.1339195068419
헬리컬 기어 인덱싱 원의 헬리컬 각도: 6.89210257934639 헬리컬 기어 폭: 10
헬리컬 기어(축 방향) 리드: 628.318530717958
헬리컬 기어의 공통 법선 방향 톱니 수: 5개, 헬리컬 기어의 공통 법선 방향 공칭값: 8.42519
헬리컬 기어의 공통 법선 방향 톱니 수: 6개, 헬리컬 기어의 공통 법선 방향 공칭값: 10.19647
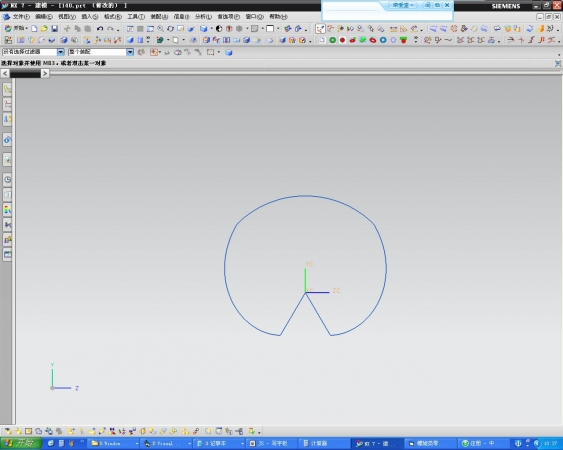
인볼루트 웜 모델링에 사용되는 끝면 인볼루트 선 다이어그램:
게시 시간: 2022년 6월 11일